Python2 round isn’t what you think
The usual wisdom is that python2 “rounding of halfway cases was away from zero”. Does that mean that Right ? Away from zero. Then, explain […]
The usual wisdom is that python2 “rounding of halfway cases was away from zero”. Does that mean that Right ? Away from zero. Then, explain […]
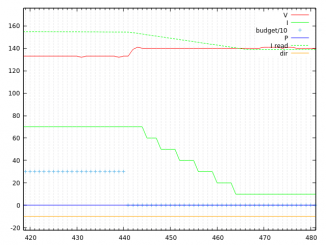
I’ve been fighting with instabilities in the MPPT algorithm for some time, and I’ve nailed it to the behavior of the system when the speed […]
How do you manage power on a battery-less, solar-powered autonomous (ro-)boat ? Well, the power management part of the prototype is done and working for […]

(Also: deriving your own class from SlicingBlockDevice) It wasn’t completely trivial to have all of them work together. Either the documentation doesn’t dig deep enough […]
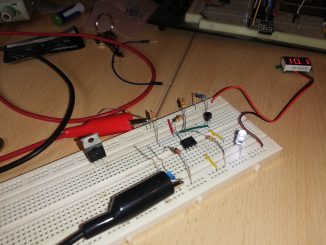
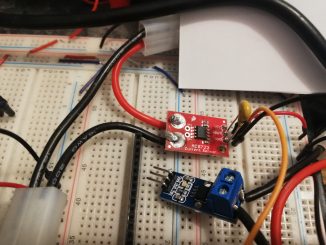
You might remember that part of the power control strategy is to use a UVLO (under voltage lock-out). Well, here it is. It’s a simple […]
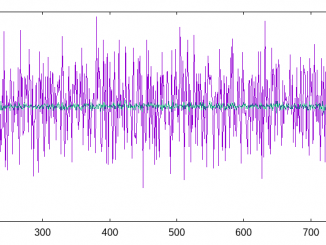
I’ve increased the sampling frequency to 23kHz and got much more stable results, stable enough to be useful. The image here shows the current measured […]

It’s a 3mm Perspex sheet. I was a bit suprised how flexible it is, I was expecting more rigidity. But it’s okay, I will (try […]

Still Spider ESC for the left motor, Blue Robotics basic ESC for the right motor. For some reason, I was unable to make PWM work […]
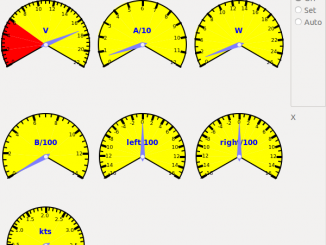
Built with wxPython. Communicate through the serial port of the PC with a Teensy making the gateway with the RFM69 radio module (and from here […]
In spite of some efforts, it’s still difficult to get a stable current measurement. As a reminder, on the prototype, the power is 25W with […]
Copyright © 2026 | WordPress Theme by MH Themes