A solar powered autonomous (robotic) boat
Current fall latency
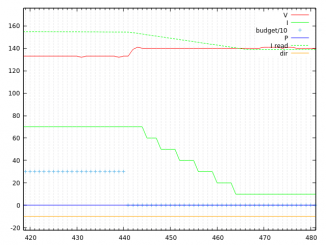
I’ve been fighting with instabilities in the MPPT algorithm for some time, and I’ve nailed it to the behavior of the system when the speed […]
A solar powered autonomous (robotic) boat
I’ve been fighting with instabilities in the MPPT algorithm for some time, and I’ve nailed it to the behavior of the system when the speed […]
How do you manage power on a battery-less, solar-powered autonomous (ro-)boat ? Well, the power management part of the prototype is done and working for […]
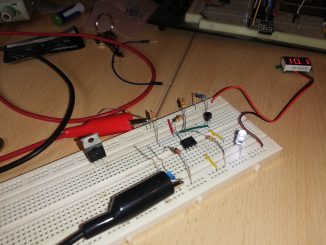
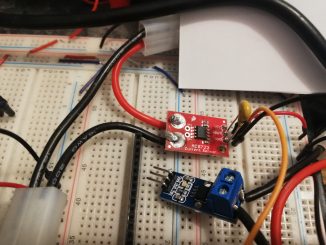
You might remember that part of the power control strategy is to use a UVLO (under voltage lock-out). Well, here it is. It’s a simple […]
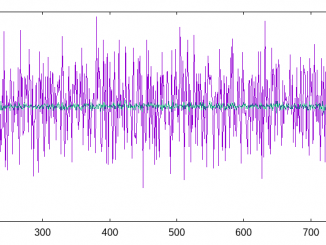
I’ve increased the sampling frequency to 23kHz and got much more stable results, stable enough to be useful. The image here shows the current measured […]

It’s a 3mm Perspex sheet. I was a bit suprised how flexible it is, I was expecting more rigidity. But it’s okay, I will (try […]

Still Spider ESC for the left motor, Blue Robotics basic ESC for the right motor. For some reason, I was unable to make PWM work […]
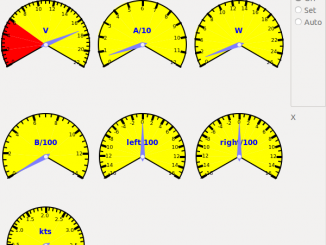
Built with wxPython. Communicate through the serial port of the PC with a Teensy making the gateway with the RFM69 radio module (and from here […]
In spite of some efforts, it’s still difficult to get a stable current measurement. As a reminder, on the prototype, the power is 25W with […]
As a reminder, the point is that the solar panel gives ~ 22V, while the motors are rated 14.4V. I thought a lot about it, […]
Bad luck, I started with a dead ESC (which I was convinced was working), and, since it was my first shot at PWM with ChibiOs, […]
Copyright © 2026 | WordPress Theme by MH Themes